近日,第18届亚洲计算机辅助外科大会(The 18th Asian Conference on Computer Aided Surgery, ACCAS2022)在泰国召开。经过激烈竞争和国际同行的严格评审,会议评选出4篇“优秀论文奖”(Excellent Paper Award),其中两篇被亚虎888电子游戏(中国)有限公司生物医学工程系廖洪恩教授团队的2020级博士生魏雪伶和2020级硕士生毛帆斩获。二人分别凭借论文《基于单目内窥镜和棱镜的立体成像系统》(Stereoscopic Imaging System Using Monocular Endoscope and Prism)和《基于液态透镜的自动聚焦和可变放大倍率腹腔镜系统设计与深度估计算法实现》(A Monocular Depth from Auto-Focusing and Multi-Magnifications Laparoscopic System),荣获“优秀论文奖”。
相比于开放式手术,微创手术具有减少患者恢复时间等优势,但微创手术中应用范围最广的单目内窥镜缺乏为医生提供三维信息的能力。《基于单目内窥镜和棱镜的立体成像系统》论文旨在解决单目内窥镜三维信息缺失的问题,提出一种成本低、结构紧凑的单目内窥镜立体成像系统,利用棱镜对光线的反射能力生成单目内窥镜的两个虚拟相机,从而赋予单目内窥镜提供有效三维信息的能力。同时,为充分验证所设计立体成像系统提供有效三维信息的能力,进行了视差估计实验,并设计了可充分利用内窥镜图像全分辨率信息和多尺度信息的多手术器械三维定位算法及实验。通过计算棱镜角度、棱镜和内窥镜之间的相对位置,保证了所采集双目图像的平行性。棱镜结构的引入为单目内窥镜实时立体成像提供了更高效的方案,该研究有效解决了单目内窥镜微创手术中医生难以获取有效三维信息的问题,为未来快速诊疗一体化提供了一定的思路与基础。
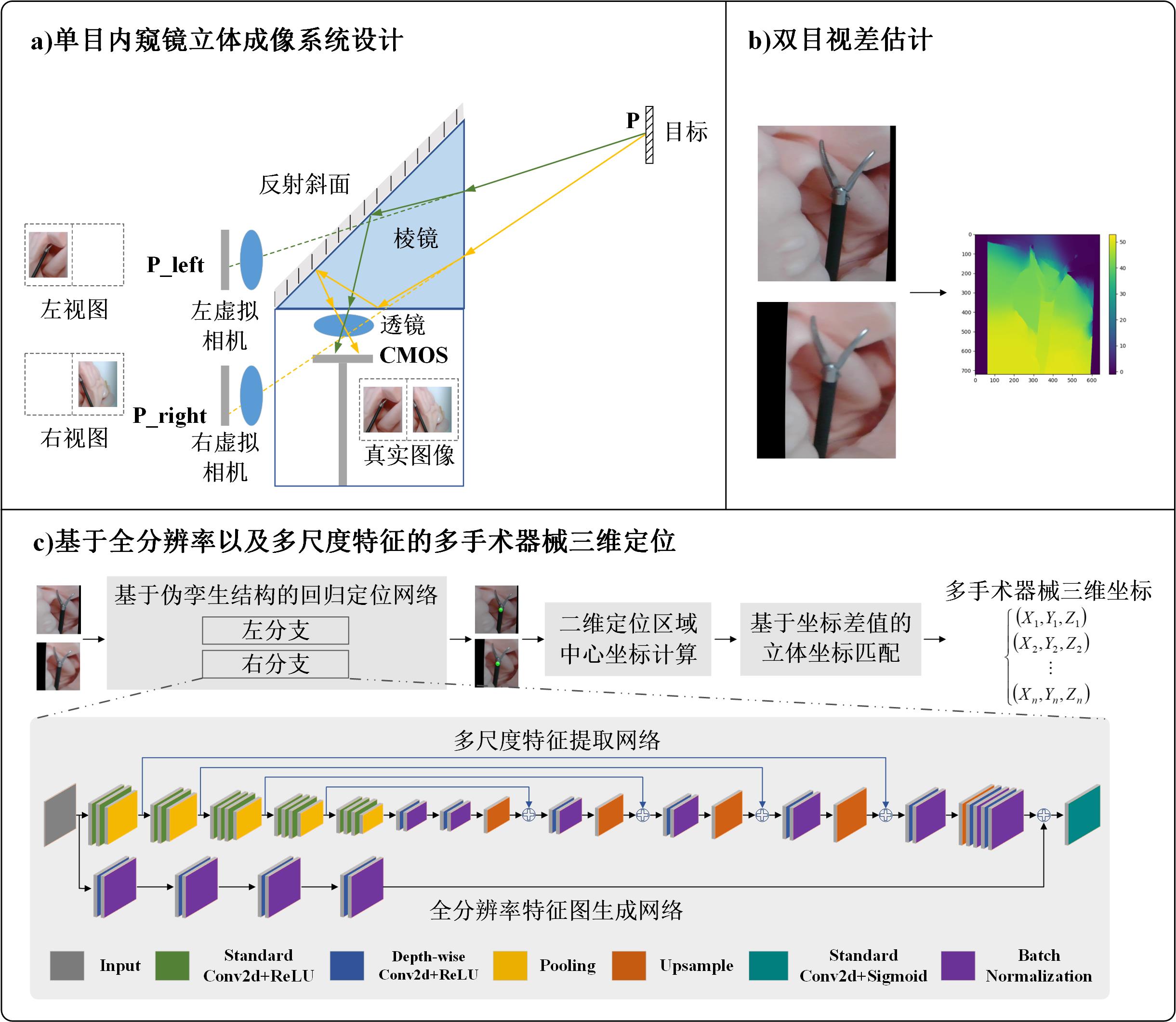
图: 单目内窥镜立体成像系统设计与三维测量算法实现
腹腔镜手术中的深度感知是精准微创手术引导的关键。传统机械调焦的腹腔镜速度慢、调焦过程不精确、术野固定。《基于液态透镜的自动聚焦和可变放大倍率腹腔镜系统设计与深度估计算法实现》论文旨在解决腹腔镜术野固定、无深度感知的问题,提出一种可安装于传统腹腔镜后端的液态透镜光学结构,实现自动聚焦和连续可变放大倍率变换。该论文同时设计了深度学习网络,将变焦计算深度的原理引入内窥镜领域,即对腹腔镜在自动聚焦过程中的变焦信息进行利用,实现快速深度估计和三维重建。该系统对成像质量和自动化过程进行改进,为术中提供可变视角和深度感知,并确保了手术过程中的自动清晰成像。该系统相比其他系统,在成像质量上达到了提升,并且摒弃了深度估计对于相机位姿和图像特征的依赖性,借助液态透镜为快速调焦和实时三维重建提供更好的方案。该研究有效地解决了医生在腹腔镜微创手术过程中无法获取深度、手术视角局限的问题,为未来快速诊疗一体化提供了一定的思路与基础。
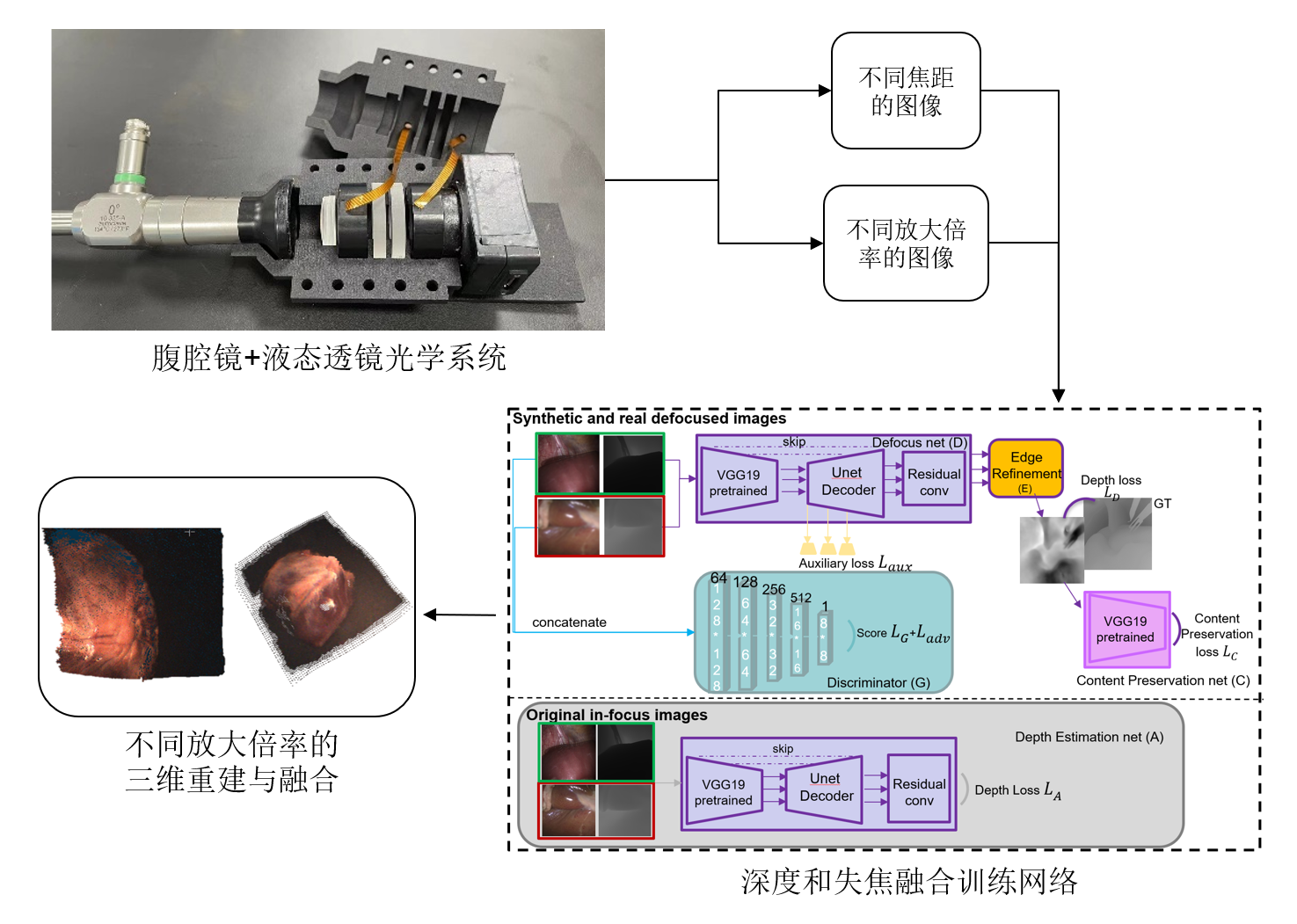
图:基于液态透镜的自动聚焦和可变放大倍率腹腔镜系统设计与深度估计算法实现
上述两篇获奖论文提出的内窥镜领域的新型三维医学引导技术揭示了未来智能医疗的发展趋势,展示了实验室在内窥镜微创手术领域的持续研究,对实现医疗影像信息的最优化理解与最充分利用具有重要意义,同时也体现了实验室在医疗健康领域立足眼前并兼顾长远发展的自主创新方向。
以上研究得到包括国家自然科学基金国家重大科研仪器研制项目和北京市自然科学基金等支持。廖洪恩课题组长期致力于三维医学影像和微创精准诊疗的研究,依据临床手术过程中的实时信息指引,以实施精密治疗从而提高治愈率和患者的生存质量(Quality of Life)为目的,致力于创建和推广一种以增强现实医学影像显示技术和智能微创器械为诊断和治疗平台的精准微创诊疗一体化模式,并取得一系列重要成果。这些技术突破传统意义微创手术概念,开拓新兴微创高精度诊疗领域,期待为未来的智能型诊疗设备研发及临床应用奠定基础。团队提出的“微创诊疗一体化”与未来新型医疗模式紧密结合,旨在提出便携、自动化、一体化的系统,为微创手术提供新思路。
亚洲计算机辅助外科大会是由亚洲计算机辅助外科领域科学家、临床医生和研究者发起的专业会议。每年有来自中国、日本、韩国、新加坡、泰国在内的多个国家上百位的研究者参与,旨在交流探讨精准计算机辅助外科领域的最新研究工作和进展,近年在智能精准诊疗方面也涌现出大量的创新成果。
